Table of Contents
Root Locus Technique
The root locus technique was introduced by W. R. Evans in 1948. This is a graphical method, in which the movement of poles in the s-plane is sketched when a particular parameter of the system is varied from zero to infinity. The root locus is a plot of the roots of the characteristic equation of the closed-loop system as a function of gain. The effect of adjusting the closed-loop gain of the system on its stability can be studied by root locus method of stability analysis.

You may also like know about Closed loop control system
Construction of Root locus Technique
In the root locus technique, the exact root locus is sketched by trial and error procedure. In this method, the poles and zeros of G(s)H(s) are located on the s-plane on a graph sheet and a trial point s=sa is selected. Determine the angles of vectors drawn from poles and zeros to the trial point. From the angle criterion, determine the angle to be contributed by these vectors to make the trial point as a point on the root locus. Shift the trial point suitably so that the angle criterion is satisfied.
A number of points are determined using the procedure. Join the points by a smooth curve which is the root locus. The value of K for a particular root can be obtained from the magnitude criterion.
The trial and error procedure for sketching root locus is tedious. A set of rules have been developed to reduce the task involved in sketching root locus and to develop a quick approximate sketch.
Construction Procedure steps
The root locus diagram or plot can be completed using the following procedure. The procedure is presented in the form of certain steps.
Starting and termination of root locus: From the open-loop transfer function, locate the poles and zeros. Each branch of the root locus originates from an open-loop pole with K = 0 and terminates either on an open-loop zero or at infinity as the value of K increases from 0 to ∞. In most cases, we will have more poles than zeros. If we have n poles and m zeros, and n > m. then n – m branches of the root locus will reach infinity. Because the root loci originate at the poles, the number of root loci is equal to the number of poles.
Root locus on the real axis: The root locus on the real axis always lies in a section of the real axis to the left of an odd number of poles and zeros.
Symmetry of the root locus: The root loci must be symmetrical about the real axis because the complex roots appear in pairs.
The member of asymptotes and their angles with the real axis: The (n − m) branches of root loci move towards infinity. They do so along straight-line asymptotes. The angle of asymptotes with respect to the real axis is given by
\phi _{A}=\frac{2q+1}{n-m}180^{0}, q=0,1,2...where n is the number of poles and m is the number of zeros.
Centroid of the asymptotes: The linear asymptotes are centered at a point on the real axis. This is called the centroid which is given by the relation
\sigma_{A}=\frac{\sum real parts of poles-\sum real parts of zeros}{n-m}Breakaway points: The root locus breakaway from the real axis where a number of roots are available, normally, where two roots exist. The method of determining the breakaway point is to rearrange the characteristic equation in terms of K. We then evaluate dK/ds = 0 in order to find the breakaway point. Since the characteristic equation can have real as well as complex multiple roots, its root locus can have real as well as complex breakaway points. However, because of conjugate symmetry of root loci, the breakaway point must either be on the real axis or must occur in complex conjugate pairs.
Intersection of the root locus with the imaginary axis: The point at which the locus crosses the imaginary axis, in case it does, is determined by applying the Routh-Hurwitz criterion. The value of K for which the locus crosses the imaginary axis is calculated by equating the terms in the first column of the Routh array of s1 and s0 to zero.
Angle of departure of the root locus: The angle of departure of the locus from a complex pole is calculated as
ϕd = 180° – sum of angles made by vectors drawn from the other poles to this pole + sum of angles made by vectors drawn from the zeros to this pole.
Root Locus Construction Rules
The following rules are applicable in sketching the root locus plot.
Rule 1: Symmetry of root locus: Any root locus must be symmetrical about the real axis, that is, the upper half of the root locus diagram is exactly the same as the lower half about the real axis. This can be seen from any root locus diagram.
Rules 2 and 3: Starting and termination of root loci: Root locus will start from an open-loop pole with gain K = 0 and terminate either on an open-loop zero or to infinity with K = ∞.
Rule 4: Number of root loci: If P is the number or poles and Z is the number of zeros in the transfer function G(s) H(s), the number of root loci N will be as follows:
N = P if P > Z
N = P = Z if P = Z
Rule 5: Root loci on the real axis: The root locus on the real axis will lie in a section of the real axis to the left of an odd number of poles and zeros.
Rule 6: The number of asymptotes and their angles with the real axis: As the value of K is increased to ∞, some branches of root locus from the real axis approach infinity along some asymptotic lines. These asymptotic lines are straight lines originating from the real axis making certain angles with the real axis. The total number of asymptotic lines and the angles they would make is calculated as follows:
Number of asymptotic lines or asymptotes = P − Z
where P is the number of poles and Z is the number of zeros of the open-loop transfer function, G(s)H(s).
The angle of asymptotes with the real axis is
\phi _{A}=\frac{(2q+1)180^{0}}{P-Z}, q=0,1,2...Rule 7: Centroid of the asymptotes: The point of intersection of the asymptotes with the real axis is called the centroid σA which is calculated as
\sigma_{A}=\frac{\sum Real parts of poles-\sum Real parts of zeros}{P-Z}Rule 8: Breakaway points: The root locus between two adjacent poles approaching each other breakaway on the real axis at a point on the real axis and move towards infinity as the value of K increases. For determining the breakaway point, we write the characteristic equation in terms of K and evaluate dK/ds = 0. The breakaway points will be either on the real axis or must occur as complex conjugate pairs.
Rule 9: Angle of departure of the root locus from a complex pole and the angle of arrival at a zero: Angle of departure of the root locus from a complex pole is given as
ϕd = 180° – sum of angles of vectors drawn from other poles to this pole + sum of angles of vectors drawn to this pole from other zeros.
Advantages of Root Locus Technique
The root locus technique is more advantageous as it gives us following information:
- The absolute stability if the system can be predicted from the location of the roots in the s-plane.
- The limiting range of the values of the system gain ‘K’ can be decided for the absolute stability of the system.
- The marginal value of the system gain ‘K’ which makes the system marginally stable can be determined and the corresponding value of the frequency of oscillation can be determined from intersection of root locus with an imaginary axis.
- Using root locus, the value of system gain ‘K’ for any point on the root locus can be determined, by using magnitude condition.
- For a particular damping ratio of the system, gain ‘K’ can be determine which helps to design the system more correctly.
- Root locus analysis also helps in deciding the stability of the control systems with time-delay.
- The gain margin of the system can be determined from root locus.
- The phase margin of the system can be determined from root locus.
- Relative stability about a particular value of ‘s= -σ’ can be determined.
- Information about the settling time of the system also can be determined from the root locus.
Example: A block diagram representation of a unity feedback control system is shown below.

For this system sketch the root locus. Also determine the value of K so that the damping ratio, ξ of a pair of complex conjugate closed-loop poles is 0.5.
Solution: Transfer function of the above system is
G(s)H(s)=\frac{K}{s(s+1)(s+2)}For determining the open loop poles, we equate the denominator of G(s) to 0.
s(s+1)(s+2)=01. There are three open loop poles at s = 0, s = –1, and s = 2.
2. We know that the number of root locus asymptotes will be equal to the number of open-loop poles minus the number of open-loop zeros. Here there is no open loop zero. There will be three branches of the root locus originating respectively at s = 0, s = –1, and s = −2.
3. The three branches of the root locus will move towards infinity, as k changes, along the asymptotic lines whose angles with the real axis are
\phi _{A}=\frac{2q+1}{n-m}180^{0}; (q=0,1,2) = (2q+1)180^{0}=60^{0}, 180^{0}, 300^{0}4. The root locus exists on the real axis between s = 0, and s = − 1; and s = − 2 moving toward ∞.
5. The centroid, −σA is calculated as
\sigma_{A}=\frac{\sum real parts of poles-\sum real parts of zeros}{n-m} = \frac{(-1-2)-0}{3-0}=-16. The break away points on the real axis is found by putting dK/ds = 0
The characteristic equation is
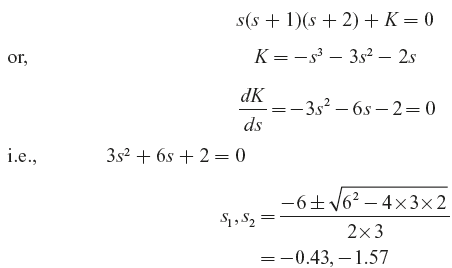
7. Intersection of the root locus on the imaginary axis is determined as follows.
The characteristic equation of the system is

We know that the occurrence of a zero row in the Routh array indicates the presence of symmetrically located roots in the s-plane.

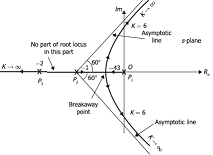
The position of poles, the asymptotes, and the root locus plot has been shown in the figure below.

Note that for breakaway point at s = −1.57, the angle criterion is not satisfied and hence can not be considered.