Table of Contents
Differences between MTI and Pulse Doppler Radar
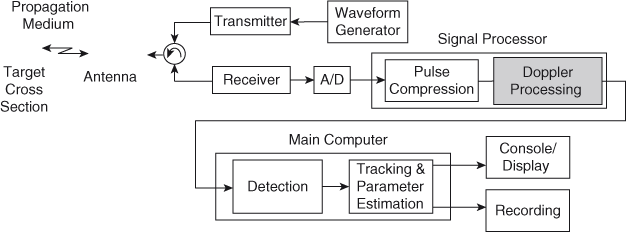
The differences between the MTI and Pulse Doppler Radar (PDR) techniques are discussed in this section for a better understanding of the MTI and Pulse Doppler Radar principles that are presented in the following sections. The operating principle of these radars is compared with the pulse radar also. The Doppler processing block where we apply the MTI and Doppler processing techniques is shown in the generic block diagram of radars.
Pulse radars
Pulse radars transmit a high-frequency pulse (or signal) and receive the corresponding echoes before a new transmitted signal is sent out. They determine the azimuth, elevation, and range of the target from the measured antenna position and propagation time of the pulse (or signal). Direction, distance and the altitude of the target can also be found. The best examples of pulse radars are the weather radars.
MTI radars
The MTI radar’s main objective is to reject the signals from stationary unwanted signals i.e., ground clutter, rain clutter, bird clutter, etc., that arrive as an echo along with the desired echo of the signal. In MTI, the processing system is used to eliminate unwanted clutter from the background and to detect moving targets even when the velocity of such targets is small relative to the radar platform. There are two basic types of MTI radars, namely,
- Coherent MTI and
- Non-coherent MTI
In coherent systems the receiver preserves the transmitted wave’s phase in order to detect the Doppler shift in frequency. In coherent MTI systems, the Doppler shift in the echo signal from the moving target is used to differentiate it from stationary target. But in non-coherent MTI systems, the moving targets can be detected by observing the relative motion between the target and clutter background, and also by observing corresponding changes in amplitudes of pulses. Coherent detection requires dealing with the envelope of a signal, g (t) and the phase of the sinusoidal carrier, ϕ (t). They need not be measured directly, but can be derived using inphase (I ) and quadrature (Q) channels.
Pulse doppler radars
Compared with MTI, it is more advanced system. A pulse radar system makes use of Doppler Effect to obtain the target information (like velocity and amplitude) but not for clutter rejection purposes. There is a great dissimilarity between Pulse Doppler Radars and conventional pulse radars as this technique has been developed into many forms to get this distinction. The number of blind speeds can be reduced by using high PRF rates. Blind speed occurs if both Doppler frequency shift and PRF or PRF multiples are equal.
The differences between the MTI and Pulse Doppler Radar are given in Table below:
Table: Differences between the MTI and Pulse Doppler Radars
| S. No. | MTI Radar | Pulse doppler radar |
| 1 | Pulse radar that uses the Doppler frequency shift to differentiate moving target from fixed targets, operate at lower PRFs (< 4 KHz), and provide more accurate range resolution. | Pulse radar that uses the Doppler frequency shift to differentiate moving target from fixed targets, operate at high PRFs (> 100 KHz), and provide better velocity discrimination and clutter rejection. |
| 2 | MTI techniques only separate moving targets from clutter. | Besides eliminating clutter it also separates targets into different velocity regimes. |
| 3 | Does not provide target velocity estimation. | Provides good estimates of target velocity. |
| 4 | Uses short waveforms (two or three pulses). | Uses long waveforms (many pulses, tens to thousands of pulses). |
| 5 | It has ambiguous Doppler measurement which is called blind speeds and unambiguous range measurement i.e., no second time-around echoes. | PRF is high enough to operate with unambiguous Doppler (no blind speeds) but at the expense of range ambiguities. |
| 6 | MTI radar uses magnetron oscillator as a source. | PDR uses klystron oscillator as a source. |
| 7 | Generally uses delay line cancellers. | Generally uses range gated Doppler filters. |
Related Posts: