Table of Contents
Servomotor
Servomotor: The servomotors are used to convert an electrical signal (control voltage) applied to them into an angular displacement of the shaft. They are normally coupled to the controlled device by a gear train or some mechanical linkage. Their ratings vary from a fractional kilowatt to few kilowatts. The main objective of the servo motor system is to control the position of an object and hence the system is known as a servomechanism.
Classification of Servomotor
The general classification of servomotors is shown in figure below.

Features of Servomotor
The maximum acceleration is the most important characteristics of servo motor. For control system application, there exists a variety of servomotors. But selection of a servomotor for a particular application depends on system characteristics and its operating conditions. In general, there are some features that a servomotor should have to suit for any application.
- The relationship between the control signal and speed should be linear.
- Speed control should have a wider range.
- The response should be faster.
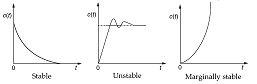
- There should be steady-state stability.
- Mechanical and electrical inertia should be low.
- Mechanical characteristics should be linear throughout the speed range.
DC Servomotor
A DC servomotor is used in applications such as machine tools and robotics, where there is an appreciable amount of shaft power is required. DC servomotors are expensive and more efficient than AC servomotors. While deriving transfer functions, the system is approximated by a linearly lumped constant parameters model by making suitable assumptions. The modes in which it could be operated are (a) field control mode and (b) armature control mode.
Transfer Function of a Field-Controlled DC Motor: In the case of a field-controlled DC motor, the armature voltage and current are kept constant. The torque developed and hence the speed of the motor will be directly proportional to the field flux, generated by the field current flowing in the field winding. When the error signal is zero, there will be no field current and hence no torque is developed. The direction of rotation of the motor depends on the polarity of the field and hence on the nature of the error signal. If the field polarity is reserved, the motor will develop torque in the opposite direction. A field-controlled DC motor is shown in the figure below.

Advantages of DC Servomotor
The advantages of DC servomotor are:
- It has a higher power output than a 50Hz motor of the same size and weight.
- Linear characteristics can easily be achieved.
- Speed control can be easily achieved (from zero speed to full speed).
- Quick acceleration of loads is possible due to the high torque to inertia ratio.
- Time constants in the transfer function have low values.
- It involves less acoustic noise.
- Encoder sets resolution and accuracy.
- It has higher efficiency since it can reach up to 90% of light loads.
- It is free from vibration and resonance.
Disadvantages of DC Servomotor
The disadvantages of DC servomotor are:
- It involves higher costs due to its complex architecture (encoders, servo drives).
- It requires a larger motor or gearbox.
- There is a necessity for safety circuits.
- It needs to be tuned so as to get a steady feedback loop.
- The motor generates peak power only at higher speeds and requires frequent gearing.
- Inefficient cooling mechanism. If motors are ventilated, they get easily contaminated.
AC Servomotor
The AC servomotor is a two-phase induction motor with some special design features. The simple constructional feature of the AC servo motor is shown in the figure below. It comprises of a stator winding and a rotor, which may take one of several forms: (i) squirrel cage, (ii) drag cup, and (iii) solid iron.

The stator consists of two pole-pairs mounted on the inner periphery of the stator, such that their axes are at an angle of 90o in space. The rotor bars are placed on the slots and short-circuited at both ends by end rings. The diameter of the rotor is kept small in order to reduce inertia and to obtain good accelerating characteristics.
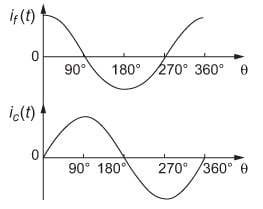
Each pole-pair carries a winding. The exciting current in the windings should have a phase displacement of 90o as shown in the figure below. The voltages applied to these windings are not balanced.
Under normal operating conditions, a fixed voltage form a constant voltage source is applied to one phase, which is called the reference phase. The other phase called the control phase is energized by a voltage of variable magnitude and polarity, which is at out of phase with respect to the fixed phase.
The control phase is usually applied from a servo amplifier. The direction of rotation reverses if the phase sequence is reversed.
Advantages of AC Servomotors
- AC servomotors involve low cost and low maintenance since there is no commutator and brushes.
- These are of high efficiency.
Applications of AC Servomotors
- These are used in X−Y recorders.
- These are also used in disk drives, tape drives printers, etc.
Comparison between AC Servomotor and DC Servomotor
The comparison between the AC servomotor and DC servomotor based on different characteristics is given in the table below.
Table ∣ Comparison between AC and DC servomotors