Table of Contents
Routh-Hurwitz Stability criterion
The Routh-Hurwitz Stability criterion gives the information on the absolute stability of a system without any necessity to solve for the closed-loop system poles. This method helps in determining the number of closed-loop system poles in the left half of the s-plane, the right half of the s-plane and on the jω axis, but not their co-ordinates. The stability of the system can be determined by the location of the poles. The Routh-Hurwitz Stability criterion is the quickest method if we just want to know whether the system is stable or unstable.
The general characteristic equation is given by,
a_{0}s^{n}+a_{1}s^{n-1}+....+a_{n-1}s+a_{n}=0Let a0 be positive. If it is negative, multiply both sides of the equation above by – 1.
You may know about Closed Loop Control System
Routh array solving steps
The following are the steps for applying Routh’s stability criterion:
Step 1: If any of the coefficients, a1,a2,……an–1, an is negative or zero, there is at least one root of the characteristic equation which has positive real part and the corresponding system is unstable. No further analysis is needed.
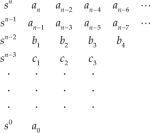
Step 2: If all the coefficients are positive, then from the first step, we cannot conclude anything about the location of the roots. Then we have to form the following array
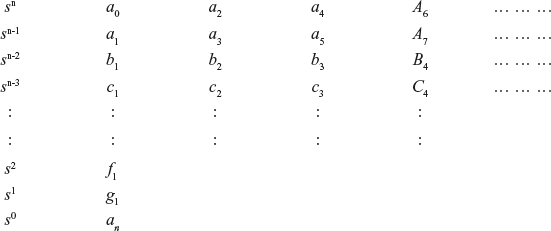
Where,

Now, examine the elements of the first column of the array.
a0,a1,b1,c1,…………,f1,g1,an
The following conclusions are derived from the Routh-Hurwitz criterion:
- If any of these elements (a0, a1, b1, c1, …) is negative, we have at least one root on the right of the imaginary axis and the system is unstable.
- The number of sign changes in the elements of the first column is equal to the number of roots located at the right of the imaginary axis.
Therefore, a system is stable if all the elements in the first column of the array are positive, i.e. there is no change in the sign.
Depending on the coefficients of the equation, the following difficulties may arise.
- The first element in any of the rows of the array is zero, but the others are not.
- The elements in one row of the array are all zero.
In the first case, replace the zero element in the first column by an arbitrary small positive number ε, and then proceed with array formation and ultimately let ε tend to zero.
The second case of the problem indicates that there are symmetrically located roots in the s-plane. The polynomial whose coefficients are just above the row of zeros in the array is called an auxiliary polynomial. The auxiliary polynomial is always an even polynomial; that is, only even powers of s appear. The roots of the auxiliary equation also satisfy the original equation.
To continue with the array, the following steps should be adopted.
- Form the auxiliary equation, A(s) = 0;
- Take the derivative of the auxiliary equation with respect to s and equate to zero. i.e., \frac{dA(s)}{ds}=0
- Replace the row of zeros with the coefficients of \frac{dA(s)}{ds}=0
- Continue the array in the usual manner with replaced coefficients.
Application of Routh’s Criterion
Relative Stability Analysis
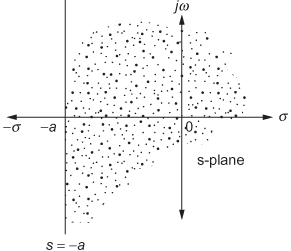
Routh’s criterion helps in determining the relative stability of the system about a particular line s=-a. Axis of the s-plane is shifted by -a and then Routh’s array is formed by substituting s=s-a, (a→ constant) in the characteristic equation. The number of sign changes in the first column of the new Routh’s array is equal to the number of roots located on the right side of the vertical line s=-a.
The shifting of the s-plane by –a is clearly shown in figure.
Determining Range of values of K
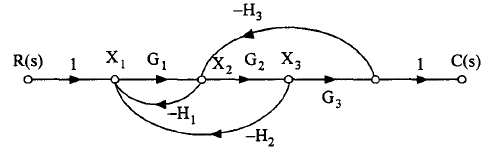
Consider a practical system whose block diagram is shown in Fig. 6.14. The range of gain, K could be determined using Routh’s array.

The closed loop transfer function is
\frac{C(s)}{R(s)}=\frac{KG(s)}{1+KG(s)H(s)}Hence, the characteristic equation of the system is given by
1+KG(s)H(s)=0The stability of the system or the location of roots of the characteristic equation (poles of the system) depends on the proper selection of value of gain, K. To determine the range of K, following steps are used:
- Routh’s array is completed in terms of gain value K.
- Range of values of K is determined such that the sign of all values present in the first column of Routh’s array remains same.
Since the stability of the system depends on the value of the gain K, the system is conditionally stable.
Advantages of Routh’s Criterion
- Stability of the system can be judged without actually solving the characteristic equation.
- No evaluation of determinants, which saves calculation time.
- For unstable system it gives number of roots of characteristics equations having positive real part.
- Relative stability of the system can be easily judged.
- By using this criterion, critical value of system gain can be determined hence frequency of sustained oscillations can be determined.
- It helps in finding out range of values of K for system stability.
- It helps in finding out intersection points of root locus with imaginary axis.
Limitations of Routh’s Criterion
- Routh’s Criterion is valid only for real coefficients of the characteristic equation.
- It does not provide exact locations of the closed-loop poles in the left or right half of the s-plane.
- It does not suggest methods of stabilizing an unstable system.
- Routh’s Criterion is applicable only to linear systems.
Example 1 : Check the system represented by the following characteristic equation for absolute stability
s^{3}+5s^{2}+25s+10=0Solution: The Routh’s array is

All the elements in the first column are positive. There is no root in the right half of the s-plane. The system is therefore absolutely stable.
Example 2: Check the system represented by the following equation for absolute stability.
s^{5}+s^{4}+3s^{3}+4s^{2}+16s+10=0Solution The array is

In the first column there are two sign changes. From +1 to –1 and then to 10. Thus, there are two roots in the right half of the s-plane. The system is unstable.