Table of Contents
Control System
Control systems play a vital role in our day-to-day life. The notion of an automatic control system is basic and well mixed in every facet of our life. The automatic control system plays an important role in the advancement and improvement of engineering skills.
A system is a combination of devices and components connected together by some form of regular interactions to act together and perform a certain objective. The system may be physical, biological, economic and the like.
The term control means to regulate, to direct or to command. Thus, a control system may be defined as a combination of devices and components connected or related so as to command, direct or regulate itself or another system.
Control systems are used in many applications, for example, the control of temperature, liquid level, position, velocity, flow, pressure, acceleration, etc.
Features of a Control System
The main feature of a control system is that there should be a clear mathematical relationship between input and output of the system. When the relation between input and output of the system can be represented by a linear proportionality, the system is called a linear control system. Again when the relationship between input and output cannot be represented by single linear proportionality, rather the input and output are related by some non-linear relation, the system is referred to as a non-linear control system.
Requirements of a Good Control System
Accuracy: Accuracy is the measurement tolerance of the instrument and defines the limits of the errors made when the instrument is used in normal operating conditions. Accuracy can be improved by using feedback elements. To increase the accuracy of any control system error detector should be present in the control system.
Sensitivity: The parameters of a control system are always changing with the change in surrounding conditions, internal disturbance or any other parameters. This change can be expressed in terms of sensitivity. Any control system should be insensitive to such parameters but sensitive to input signals only.
Noise: An undesired input signal is known as noise. A good control system should be able to reduce the noise effect for better performance.
Stability: It is an important characteristic of the control system. For the bounded input signal, the output must be bounded and if the input is zero then the output must be zero then such a control system is said to be a stable system.
Bandwidth: An operating frequency range decides the bandwidth of the control system. Bandwidth should be as large as possible for the frequency response of the good control system.
Speed: It is the time taken by the control system to achieve its stable output. A good control system possesses high speed. The transient period for such a system is very small.
Oscillation: A small number of oscillation or constant oscillation of output tends to indicate the system to be stable.
Basic Components of a Control System
The basic components of a control system can be represented by:
- reference input element which causes the command signal;
- feedback element which produces the feedback signal;
- error detector;
- controller;
- controlled system; and
- the output signal, that is, the controlled output.
These components are shown in the form of a system block diagram as in the figure below and are described as follows.
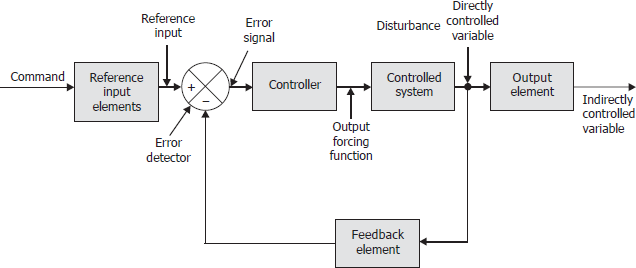
- Reference Input Elements: These constitute the position of the feedback control system that establishes the relationship between the command and certain reference input.
- Command: Command is a deliberately introduced signal established by some means, external to and independent of the feedback control system under consideration.
- Reference Input: It is a signal established as a standard of comparison for a feedback control system by virtue of its relation to the command.
- Error Detector: It is an element in which one system variable (feedback signal) is subtracted from another variable (reference signal) to obtain the third variable (error signal). It is also called a comparator.
- Feedback Element: Feedback signal is a function of the controlled output which is compared with the reference signal to obtain the actuating signal.
- Error Signal: It is an algebraic sum of the reference input and the primary feedback.
- Controller: The controller is an element that is required to generate the appropriate control signal.
- Output Forcing Function: It is the condition that is varied as a function of the actuating signal so as to change the value of the controlled variable.
- Controlled System: It is a body, process or machine of which a particular condition is to be controlled, for example, a spacecraft, reactor, boiler, CNC machine, etc.
- Controlled Variable: It is a variable that is directly measured and controlled. The disturbance is input other than a command that tends to affect the value of the controlled variable.
- Output Elements: These are the elements that establish the relationship between the directly controlled variable and indirectly controlled variable.
Classification of Control System
Open-Loop Control System
A control system that cannot adjust itself to the changes is called an open-loop control system. In general, manual control systems are open-loop systems. The block diagram of the open-loop control system is shown in the Figure below.

Here, r(t) is the input signal, u(t) is the control signal/actuating signal and c(t) is the output signal.
In this system, the output remains unaltered for constant input. In case of any discrepancy, the input should be manually changed by an operator. An open-loop control system is suited when there is tolerance for fluctuation in the system and when the system parameter variation can be handled irrespective of the environmental conditions.
Advantages of Open-loop System
- These systems are simple in construction and design.
- The open-loop systems are economic.
- These systems are easy from the maintenance point of view.
- Usually, these systems are not much troubled with problems of stability.
- These systems are convenient to use when output is difficult to measure.
Disadvantages
- These systems are not accurate and reliable because their accuracy is dependent on the accuracy of the calibration.
- In these systems, inaccurate results are obtained with parameter variations, i.e., internal disturbances.
- Recalibration of the controller is required from time to time for maintaining quality and accuracy.
Closed-Loop Control System
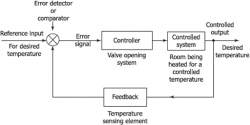
Any system that can respond to the changes and make corrections by itself is known as a closed-loop control system. The only difference between open-loop and closed-loop systems is the feedback action. The block diagram of a closed-loop control system is shown in the Figure below.
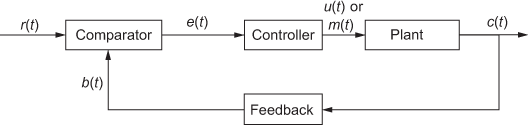
Here, r(t) is the input signal, e(t) is the error signal/actuating signal, u(t) or m(t) is the control signal/manipulated signal, b(t) is the feedback signal and c(t) is the controlled output.
Here, the output of the machine is fed back to a comparator (error detector). The output signal is compared with the reference input r(t) and the error signal e(t) is sent to the controller. Based on the error, the controller adjusts the air conditioner’s input [control signal u(t)]. This process is continued until the error gets nullified. Both manual and automatic controls can be implemented in a closed-loop system. The overall gain of a system is reduced due to the presence of feedback. In order to compensate for the reduction of gain, if an amplifier is introduced to increase the gain of a system, the system may sometimes become unstable.
Advantages of close-loop system
- In these systems, accuracy is very high due to the correction of any arising error.
- Since these systems sense environment change as well as internal disturbances, the error is modified.
- There is a reduced effect of non-linearity in these systems.
- These systems have high bandwidth i.e., high operating frequency zone.
- There are facilities of automation in these systems.
Disadvantages
- The systems are complicated in design.
- The close-loop systems are costlier.
- These systems may be unstable.
Some examples of open-loop and closed-loop control systems are as follows:
- Traffic-light systems vary in operation. Some systems are closed-loop and some are open- loop. In the open-loop type, there is a timing mechanism that is set to switch the lights at regular intervals, irrespective of the volume of traffic. In the closed-loop type, however, the amount of traffic passing through the junctions is monitored (electronically or otherwise), and the duration of the “red” and “green” conditions are adjusted for each part of the junction accordingly.
- An example of the action of an open-loop system is a car-wash machine in which all cars receive the same amount of washing irrespective of how dirty they are. Here, the output is the cleanliness of the cars, which corresponds to a given setting of the machine (amount of water and washing time). A human being, however, who washes cars, automatically makes sure that the dirtier cars receive more attention than others. Car washing by a responsible human being is, therefore, a closed-loop control system. An ordinary washing machine is an open-loop system.
- A refrigerator is a closed-loop system. Its temperature is measured by a thermostat which turns the motor ON when the temperature rises above the desired value and turns the motor OFF when the temperature again reaches the desired value.
- The lighting of a room is an open-loop system. Once the light is turned on, it will stay on (until it is switched off ) irrespective of whether the room is dark or light.
Differences between the open-loop and closed-loop systems
| S.No. | Open-loop System | Closed-loop System |
| 1 | The feedback element is absent. | The feedback element always present. |
| 2 | An error detector is not present. | An error detector is always present. |
| 3 | An open-loop system is generally stable. | The closed-loop system can become unstable under certain conditions. |
| 4 | They can be affected by non-linearities in the system. | They can adjust the effects of non-linearities present in the system. |
| 5 | It is easy to construct. | It has complicated construction. |
| 6 | It is economical. | It is costly. |
| 7 | It has a small bandwidth. | It has a large bandwidth. |
| 8 | They are generally inaccurate. | They are accurate. |
| 9 | It has less maintenance. | It has more maintenance. |
| 10 | It is unreliable. | It is reliable. |
| 11 | Examples: Washing machine, fixed time traffic control system, room heater, etc | Examples: Servomotor control, generator output voltage control system, refrigerator, biological system, etc. |
Other Types of Control Systems
Linear and Non-linear
A linear system is one that obeys the principle of superposition. The principle of superposition states that the response produced by the simultaneous application of two different forcing functions is equal to the sum of individual responses.
Non-linear systems do not obey the principle of superposition. Almost all practical systems are non-linear to some extent. Non-linearities are introduced due to saturation effect of system components, frictional forces, play between gear trains, mechanical linkages, non-linearities of electronic components like power amplifiers, transistors, etc., used. Control of linear systems is easy as compared to the control of non-linear systems.
Time-invariant and Time-varying
The time-invariant control system is one whose parameters do not vary with time. The response of such a system is independent of the time at which input is applied. For example, resistance, inductance, and capacitance of an electrical network are independent of time.
A time-varying system is one in which one or more parameters vary with time. The response depends on the time at which input is applied. A space vehicle control system where mass decreases with time, as fuel it carries is consumed during flight, is an example of a time-varying system.
Continuous-Time and Discrete
In continuous control systems, all system parameters are a function of continuous-time, t. A discrete-time control involves one or more variables that are known only at discrete instants of time.
A continuous-time or continuous data is one in which the signals at various parts of the system are continuous functions of time. These signals are continuous-time signals. For example, when we consider speed control of a d.c. motor, we know that the output, that is, the rotation in terms of radians per second is a function of voltage and current provided as input to it on a continuous-time basis. Such a system takes a continuous-time input and provides a continuous-time output.
Single-Input–Single-Output (SISO) and Multi-Input–Multi-Output (MIMO)
A system with one input and one output is called a single-input–single-output control system. In other words, there is only one command and one controlled output.
A system with multiple inputs and multiple outputs is called a multi-input–multi-output control system. For example, boiler drum level control, robot arm control, etc. The robot arm performs multiple functions with multiple inputs. These multiple functions are called the degree of freedom.
Lumped Parameter and Distributed Parameter
Control systems that can be described by ordinary differential equations are lumped parameter control systems whereas distributed parameter control systems are described by partial differential equations. The parameters of a long transmission line, that is, the resistance, inductance, and capacitance, are distributed along the line but they may be considered as lumped parameters at certain points.
Deterministic and Stochastic
A control system is deterministic if the response is predictable and repeatable. If not, the control system is a stochastic control system that involves random variable parameters.
Static and Dynamic Systems
A system is called dynamic or time-dependent if its present output depends on past input, whereas, a static system is the one whose current output depends only on the current input.