Table of Contents
Potentiometer
A potentiometer is a variable resistor that is used to convert a linear or angular displacement into voltage. Since the resistance varies according to the linear/angular displacement of sliding/wiper contact, it is used to measure the mechanical displacement. There are two types of potentiometers: DC potentiometer and AC potentiometer. Three terminals are provided: two of them are connected to the ends of the variable resistance track and the third one is connected to the sliding contact. When an input voltage vi(t) is applied across the fixed end terminals, the output voltage vo(t) at the sliding terminal is proportional to the displacement. The schematic arrangement of the rotary DC potentiometer is shown in the figure below. If the sliding contact is connected to a shaft, the output gives the measure of the shaft position. Hence, a potentiometer will be useful in comparing the position of two shafts.

A variable reference voltage is obtained by using two potentiometers. Here, one potentiometer will produce an output voltage corresponding to the reference shaft position and the other will produce an output voltage corresponding to the shaft that has to be controlled. The arrangement using two rotary potentiometers is shown in the figure below. When a constant voltage (AC/DC) is applied to the fixed end terminals of the potentiometer, the output voltage will be directly proportional to the difference between the positions of the two shafts.
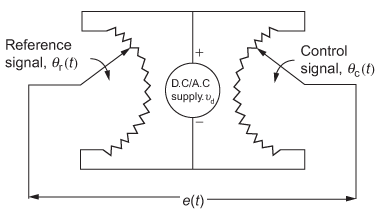
If DC voltage is applied to the potentiometers, the polarity of the error determines the relative position of the two shafts. If AC voltage is applied, then their phase determines the relative position of two shafts. But the error signal e(t) is the difference between the reference signal θr(t) and the controlled signal θc(t). Thus, the error signal is given by
e(t)=K[\theta _{r}(t)-\theta _{c}(t)]where K is the sensitivity of the error detector in volts/radian. The value of K depends on the voltage and displacement of the potentiometer and is given by
K=\frac{v_{i}}{n\times 2\Pi } volts/radian
where vi is the supply voltage of the potentiometer and n is the number of revolutions made by the shaft (i.e., displacement). If the applied voltage is 100 volts and the potentiometer makes 10 revolutions, then the value of K is given by
K=\frac{100}{10\times 2\Pi }=5 volts/radian
Characteristics of Potentiometers
Linearity: It produces the output voltage that is proportional to the displacement or change in the shaft position. The deviation in the linearity occurs due to inequality in the turns (size, space) and the diameter of the resistance wire may not be uniform along its length.
Normal Linearity: It is the deviation in percentage of total measured resistance of the actual resistance value at any point from the best straight line drawn to the resistance versus shaft position curve.
Resolution: It is the smallest incremental change in resistance that can be measured between the slider and one end of the fixed end of the potentiometer.
Loading Error: There is a variation in resistance of the potentiometer due to non-linearity when the load resistance is connected across it. It may be minimized by adding a non-linear resistance in the potentiometer or by using a very large load resistance.
Zero-Based Linearity: It is the voltage between the brush and the bottom point that is zero. The linearity curve passes through zero.
Power-Handling Capacity
It can dissipate the power (P) in watts continuously. Hence, the maximum voltage that can be applied across the potentiometer is V_{i(max)}=\sqrt{PR_{P}}, where RP is the total resistance of the potentiometer.
Applications of Potentiometer
It is used to measure the mechanical displacement and to determine an error signal by using two identical potentiometers. In addition, it is used for position feedback in position control systems such as robots. It is also used for volume control in radio and brightness control in television.